|
Shreya Gummadi I'm a Ph.D. Candidate in Computer Science at the University of Illinois Urbana-Champaign (UIUC), advised by Dr. Girish Chowdhary. My research focuses on developing resource-efficient autonomous navigation systems capable of learning, reasoning, and adapting on the robot under real-world deployment constraints. More broadly, I am interested in computer vision, deep learning, and generative AI for mobile robotics. Prior to joining UIUC, I worked at Deuce Drone as a Robotics Engineer, building AI-powered autonomous navigation frameworks for last-mile delivery drones. I earned an M.Eng in Robotics from the University of Maryland, College Park, where I worked with Dr. Anindo Roy on robot-assisted ankle rehabilitation for stroke patients and Dr. Min Wu on image-based non-contact blood oxygen estimation. When I am not working on robots, I enjoy crocheting, wheel throwing, reading, and traveling. |
|
Research |
|
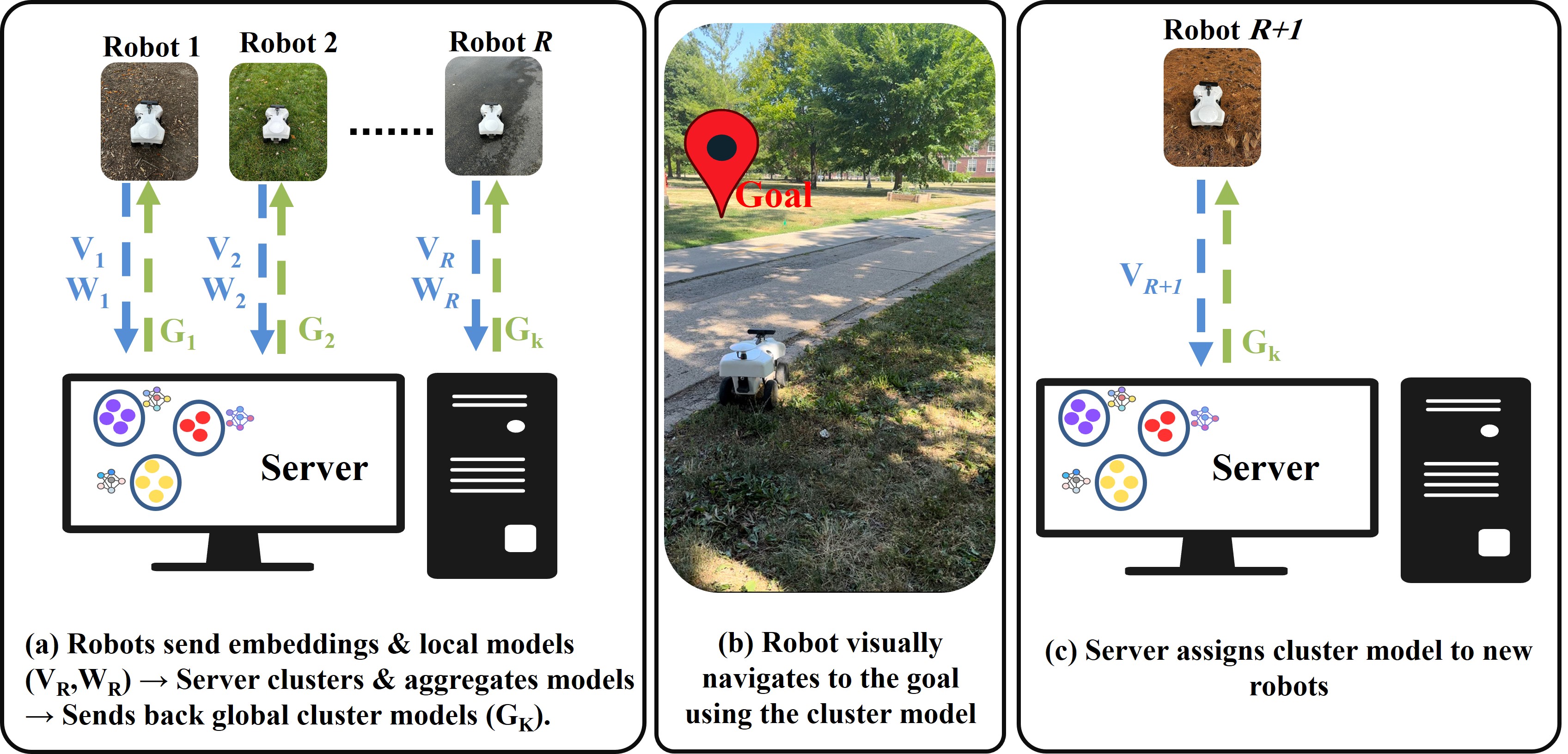
Fed-EC: Bandwidth-Efficient Clustering-Based Federated Learning for Autonomous Visual Robot Navigation
Shreya Gummadi, Mateus V. Gasparino, Deepak Vasisht, Girish Chowdhary IEEE RA-L, 2024 project page / arXiv A federated learning framework that clusters robots based on embedding similarities to learn personalized navigation models in diverse outdoor environments, achieving comparable performance to centralized learning while reducing bandwidth usage by ~23x. |
|
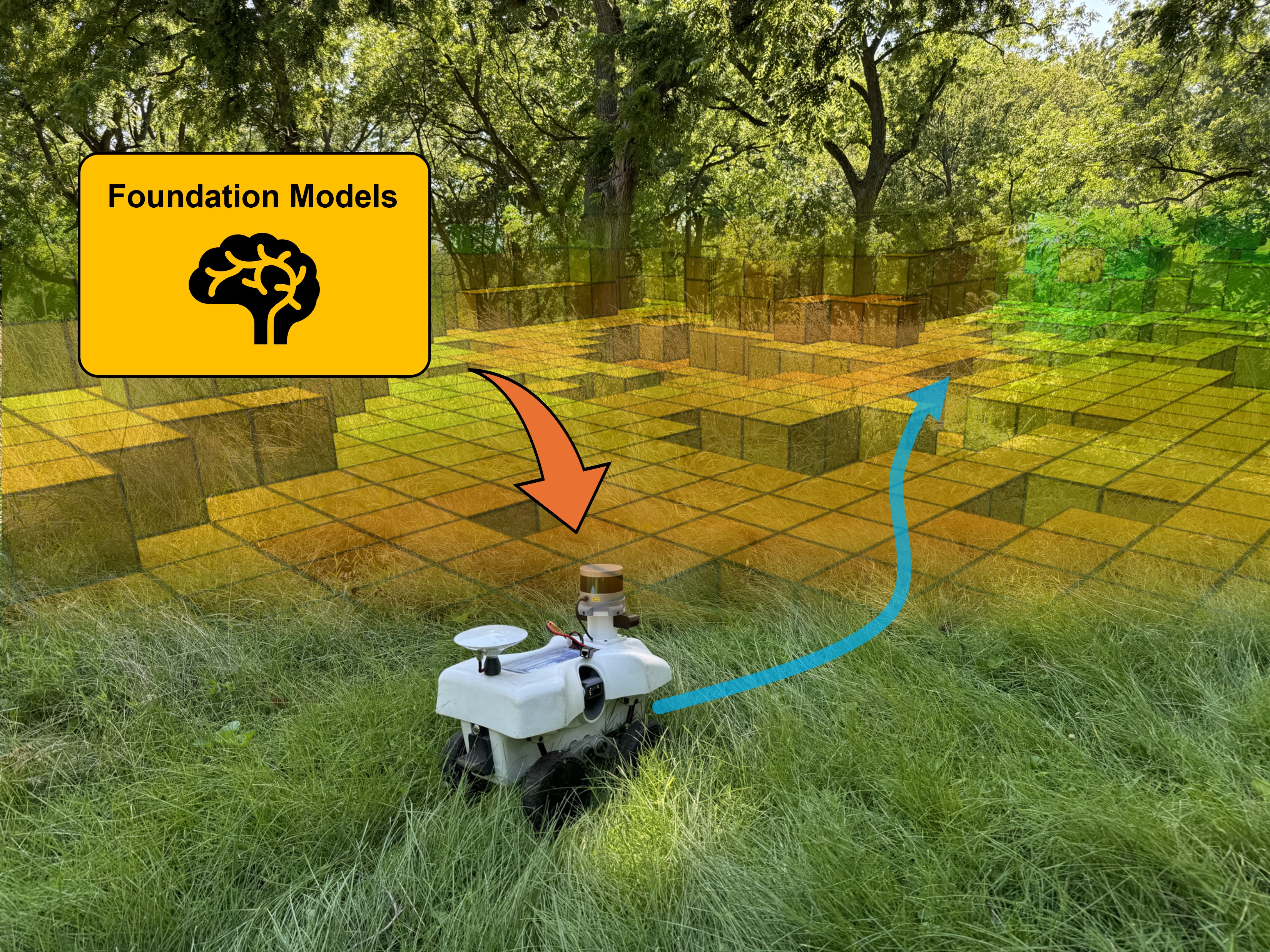
ZeST: an LLM-based Zero-Shot Traversability Navigation for Unknown Environments
Shreya Gummadi*, Mateus V. Gasparino*, Gianluca Capezzuto, Marcelo Becker, Girish Chowdhary Under Review project page / arXiv A zero-shot Large Language Model (LLM) based framework that generates traversability maps for unknown environments, enabling robots to safely navigate diverse terrains without prior training or data collection. |
|
A Clustered Federated Learning Framework for Visually Guided Autonomous Robots
Shreya Gummadi, Mateus V. Gasparino, Deepak Vasisht, Girish Chowdhary Extended Abstract at IEEE ICRA@40, 2024 |
|
|
Learning on the Edge: Bandwidth-Efficient Clustered Federated Learning for Robots in the Wild
Shreya Gummadi, Mateus V. Gasparino, Deepak Vasisht, Girish Chowdhary RSS Workshop on Resource Constrained Robotics, 2025 |
|
|
Website adapted from Jon Barron. |